StellungFreigabe
Description#
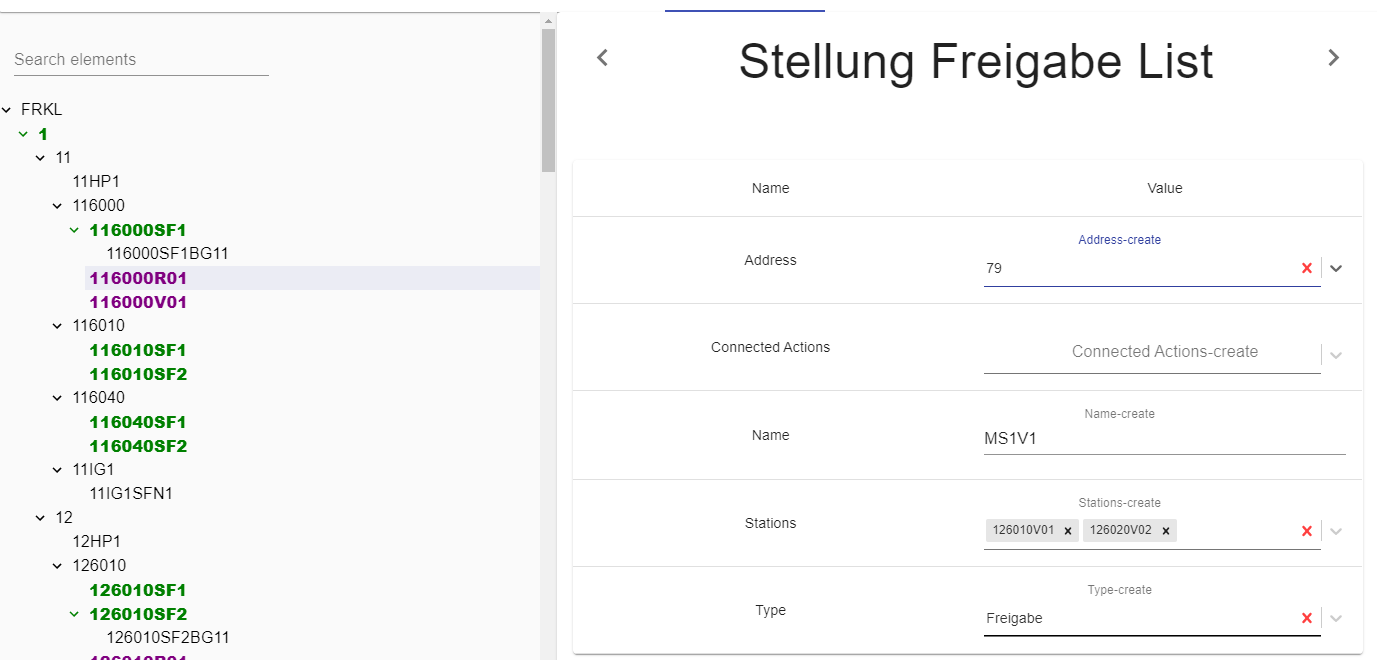
This parameter is used to define robot's 'Stellung Freigabe'.
Definition#
| Name | Value |
|---|---|
| Name | Name of 'Freigabe' |
| Address | Unique 'Friegabe' position (57-80) |
| Type | Type of 'Freigabe' according the standard. |
| Stations | Binded stations (Now is not use, 'Feature' is prepared in progress). |
| Connected Actions | Binded process actions (Now is not use, 'Feature' is prepared in progress). |
In Robot Tags exist address scope for 'StellungFreigabe'.